|
|

|

|
| e-Pub |
Section: New Results
New methods for data assimilation
One major objective of Clime is the conception of new techniques for data assimilation in geophysical sciences. Clime is active on several of the most challenging theoretical aspects of data assimilation: data assimilation methods based on non-Gaussian assumptions, methods for estimating errors, ensemble filtering techniques, 4D variational assimilation approaches, ensemble-variational methods, etc.
This year, focus was on ensemble-variational methods. We introduced a new method known as the iterative ensemble Kalman smoother. It is an ensemble method with an underlying cost function; it does not require the use of the adjoint; and it is flow-dependent. Because of these propreties, the IEnKS outperforms other data assimilation methods when tested with perfect meteorological toy-models. Its potential for parameter estimation has also been demonstrated.
An iterative ensemble Kalman smoother
Participants : Marc Bocquet, Pavel Sakov [BOM, Australia] .
The iterative ensemble Kalman filter (IEnKF) was recently proposed to improve the performance of ensemble Kalman filtering with strongly nonlinear geophysical models. IEnKF can be used as a lag-one smoother and extended to a fixed-lag smoother: the iterative ensemble Kalman smoother (IEnKS [12] ). IEnKS is an ensemble variational method. It does not require the use of the tangent linear of the evolution and observation models, nor the adjoint of these models: the required sensitivities (gradient and Hessian) are obtained from the ensemble. Looking for the optimal performance, we consider a quasi-static algorithm, out of the many possible extensions. IEnKS is explored on the Lorenz'95 model and on a 2D turbulence model. As a logical extension of IEnKF, IEnKS significantly outperforms standard Kalman filters and smoothers in strongly nonlinear regimes. In mildly nonlinear regimes (typically synoptic scale meteorology), its filtering performance is marginally but clearly better than the standard ensemble Kalman filter, and it keeps improving as the length of the temporal data assimilation window is increased. For long windows, its smoothing performance very significantly outranks the standard smoothers, which is believed to stem from the variational but flow-dependent nature of the algorithm. For very long windows, the use of a multiple data assimilation variant of the scheme, where observations are assimilated several times, is advocated. This paves the way for finer re-analysis freed from the static prior assumption of 4D-Var, but also partially freed from the Gaussian assumptions that usually impede standard ensemble Kalman filtering and smoothing.
Joint state and parameter estimation with an iterative ensemble Kalman smoother
Participants : Marc Bocquet, Pavel Sakov [BOM, Australia] .
Both ensemble filtering and variational data assimilation methods have proven being useful in the joint estimation of state variables and parameters of geophysical models. Yet, their respective benefits and drawbacks in this task are distinct. An ensemble variational method, known as the iterative ensemble Kalman smoother (IEnKS), has recently been introduced. It is based on an adjoint-free variational but flow-dependent scheme. As such, IEnKS is a candidate tool for joint state and parameter estimation that may inherit the benefits from both the ensemble filtering and variational approaches.
In this study [13] , an augmented state IEnKS is tested on the estimation of the forcing parameter of the Lorenz'95 model. Since joint state and parameter estimation is especially useful in applications where the forcings are uncertain but nevertheless determining, typically in atmospheric chemistry, the augmented state IEnKS is tested on a new low-order model that combines the Lorenz'95 model, representing its meteorological part, and the advection diffusion of a tracer for its chemical part. In these experiments, IEnKS is compared to the ensemble Kalman filter, the ensemble Kalman smoother and a 4D-Var method, that are considered choices to solve these joint estimation problems. In this low-order model context, IEnKS is shown to significantly outperform those methods, for any length of the data assimilation window, and for present time analysis as well as retrospective analysis. Besides, the performance of IEnKS is even more striking on parameter estimation, whereas getting close to the same performance with 4D-Var is likely to require both a long data assimilation window and a complex modeling of the background statistics.
Data assimilation applied to air quality at urban scale
Participants : Vivien Mallet, Raphaël Périllat, Anne Tilloy, Fabien Brocheton [Numtech] , David Poulet [Numtech] , Frédéric Mahé [Airparif] , Pierre Pernot [Airparif] , Fabrice Joly [Airparif] .
Based on Verdandi [14] , Polyphemus and the “Urban Air Quality Analysis” software, data assimilation was further developed at urban scale. The Best Linear Unbiased Estimator (BLUE) is computed to merge the outputs of the ADMS Urban model and the observations of a sparse monitoring network [19] . We improved the modeling of the covariance of the model state error. The assimilation was applied for part of Paris (see Fig. 2 ) and for Paris region, in the context of the PRIMEQUAL project PREQUALIF (“Multidisciplinary Program on Air Quality Research in Île-de-France”).
|
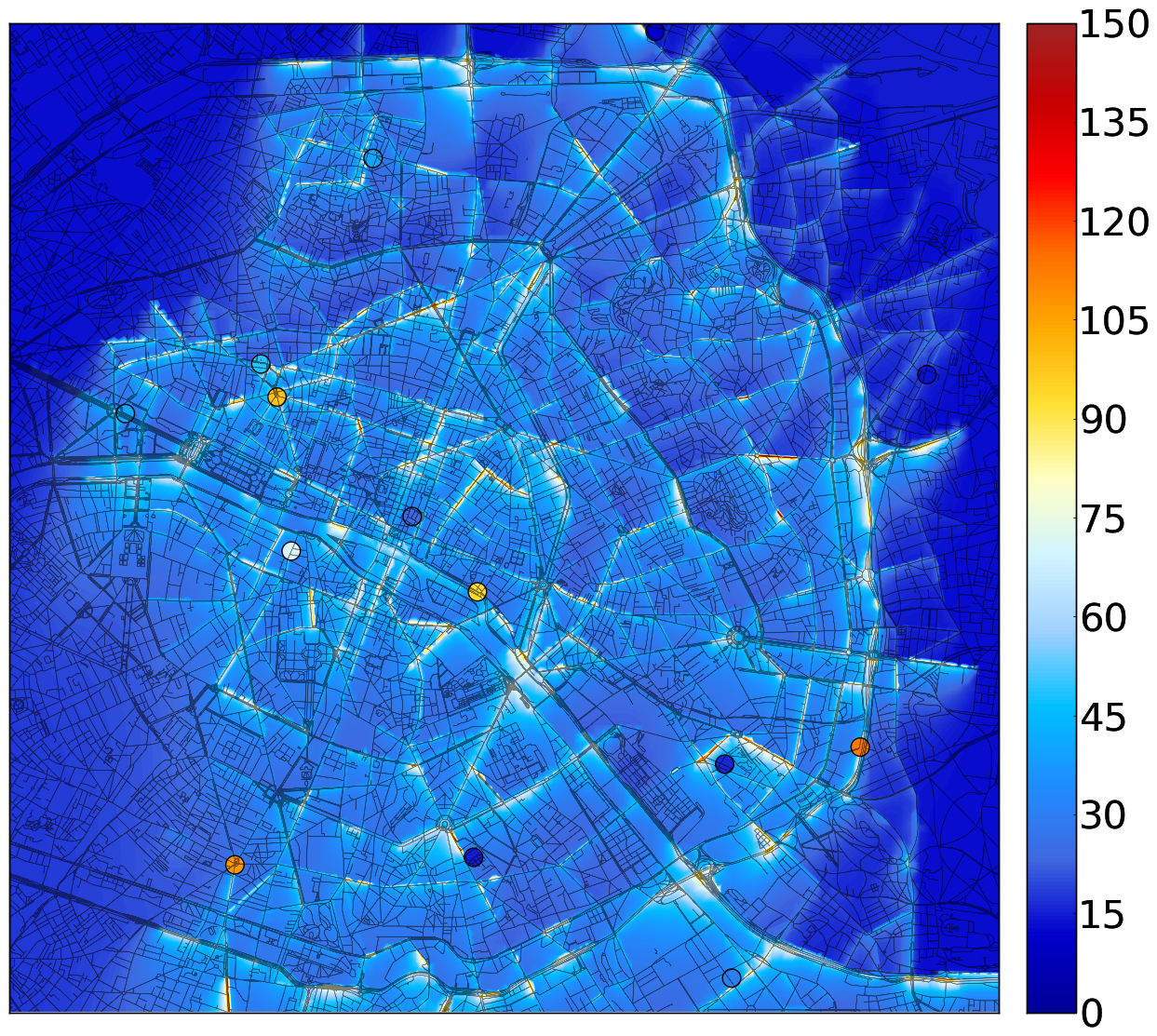
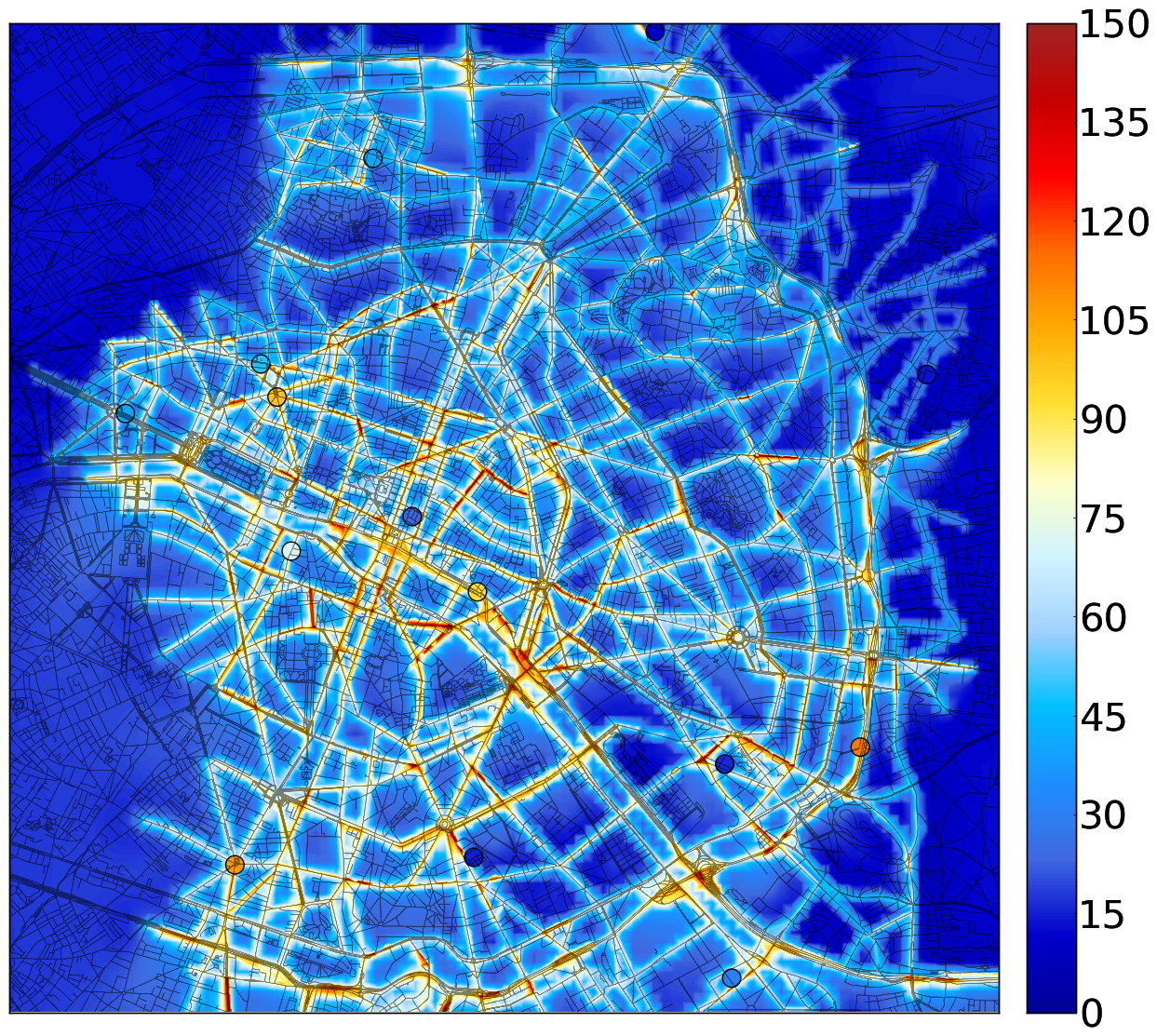
It was applied to nitrogen dioxide, particulate matter and black carbon. Specific investigations were carried out to estimate the variance of the a posteriori error and to determine the impact of each monitoring station on the final results.